
前言
理论基础
- BLDC(Brushless DC Motor),无刷直流电机,与传统的有刷直流电机(Brushed DC Motor)相比具有更高效率、更长寿命和更低的维护要求。除此之外,BLDC还具有高功率密度(体积小、重量轻、功率输出大)和高转速的优势。
- PMSM(Permanent Magnet Synchronous Motor),永磁同步电机,亦称无刷交流电机(BLAC, Brushed AC Motor)。PMSM具有和BLDC类似的结构特点。
- FOC(Field-Oriented Control),磁场定向控制技术,也被称作矢量控制(Vector Control),是一种用于交流电机控制的高级控制算法。它通过准确控制电机的磁场方向和大小,实现对电机速度和转矩的精确控制。
FOC驱动器与无刷电调的区别
电调(ESC)的全称为电子调速器(Electronic Speed Controller),是一种硬件产品。FOC则是一种电机驱动控制方法。
无刷电机驱动原理
电机由两个主要组成部分构成:固定的定子(stator)和旋转的转子(rotor),无刷电机也不例外。转子又分为内转子和外转子两类。我们最熟悉的、在航模和无人机上使用的就是外转子结构的无刷电机,而内转子无刷电机则通常用于家电、工业驱动和机器人等应用。
注:若线圈是转子则磁极是定子,若线圈是定子则磁极是转子。下图所示无刷电机属于前一种结构。

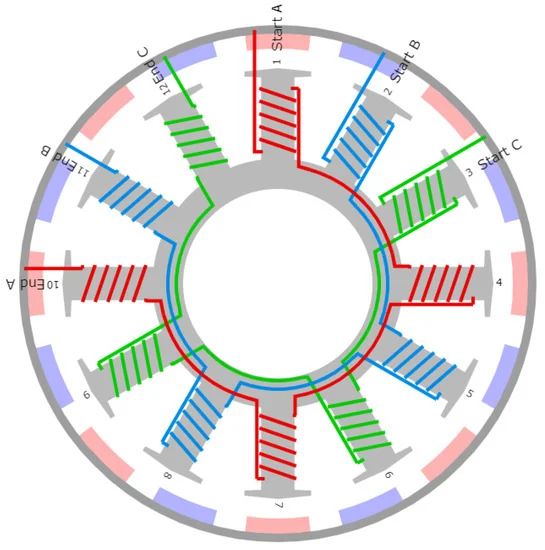
另一组常见的概念是相数和极数。电机的相数,可以简单理解为电机定子线圈的组数。电机的极数则是指电机转子上磁极的数量(一对磁极包括一个N极和一个S极)。下图所示为一个具有12个电机绕组槽(slot)、16个磁极(magnet)的三相无刷直流电机示意图。
常见电机的相数,通常有以下几种:
- 单相电机(Single-Phase Motor):单相电机具有一个绕组(相),通常用于低功率应用,如小型家用电器、风扇、泵等。单相电机的运行起动相对简单,但通常功率较低。
- 三相电机(Three-Phase Motor):三相电机具有三个绕组(相),广泛应用于工业和商业领域,包括大型马达、制造设备、电动车、空调等。它们通常比单相电机具有更高的功率和效率,因为它们的电流分布更均匀,能够提供平稳的旋转力矩。
- 步进电机(Stepper Motor):步进电机通常具有多个相,通常是两相、四相或八相。它们通过逐步激活不同的相来实现精确的角度控制,因此在需要精确位置控制的应用中非常有用,如打印机、CNC机床和3D打印机。
通过相数和极数可用以下公式计算转速(单位:转每分钟,RPM):转速 = (60 * 电源频率) / (极对数 * 相数)
这个公式称为同步转速公式,它描述了电机转子旋转的速度与相数和极对数之间的关系。需要注意的是,这个公式是针对同步运行状态下的电机转速,实际运行时可能存在一定的滑差。
基础知识
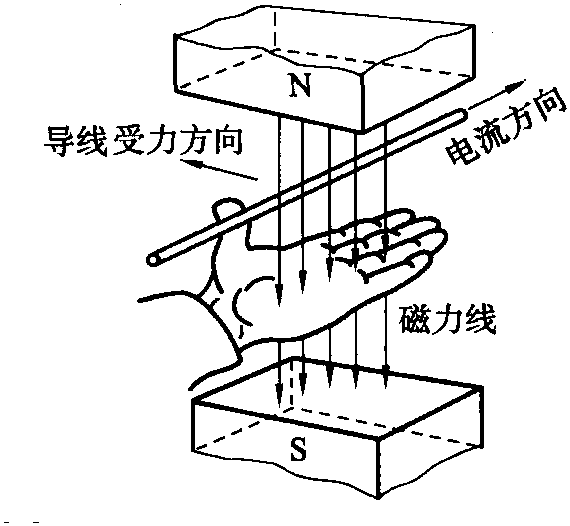
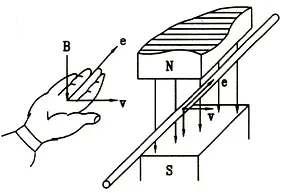
- 左手定则(电动机原理。事实后面介绍的安倍定则也适用于解释电机的运动原理):用于判断导线在磁场中的受力方向。拇指与其他四指方向垂直且在同一平面,磁感线从手心垂直穿过,四指指向电流方向,则大拇指指向的就是安培力方向(即导体受力方向)或洛伦兹力。(当电流方向与磁场平行时,电荷运动方向也与磁场方向平行,所受洛伦兹力为零)
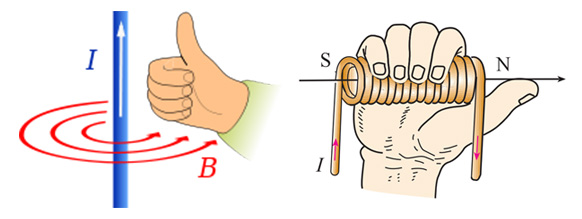
- 右手螺旋定则(安培定则):用于判断电流的感应磁场方向。一般来说有两种情况,分别为“单根导线的感应磁场方向”和“通电螺线管的磁场方向”。左图所示,右手大拇指指向电流方向,则四指弯曲方向就是磁场方向。右图所示,四指蜷握并顺着电流方向,则拇指指向的就是磁场方向,即N极。
- 右手定则(发电机原理):用于判断导线切割磁感线时所产生的电流的方向。伸开右手,使大拇指跟其余四指垂直并且都跟手掌在一个平面内,让磁感线垂直穿入手心,大拇指指向导体运动方向,则其余四指所指方向即为感生电动势方向。(注:利用反电动势测量电路获取转子位置,是无感电调工作原理之一)
BLDC驱动原理
BLDC驱动原理基于电子换向技术,相比传统有刷直流电机,它没有碳刷和机械换向器。BLDC的驱动依靠精确改变电机上多个定子线圈(假设线圈绕组是定子如航模无刷电机)的电流交变频率和幅值(表现为多个波形变化曲线及其相序关系),在定子周围形成磁场, 驱动转子永磁体转动。因此可以将研究的重点放在如何改变多个定子线圈的相序和电流,而这需要交给驱动电路、控制器、传感器(若是闭环控制)这些硬件以及控制器上的算法软件,所以到了具体实现这一步,就得靠硬件和软件!
电机模型和运动分析
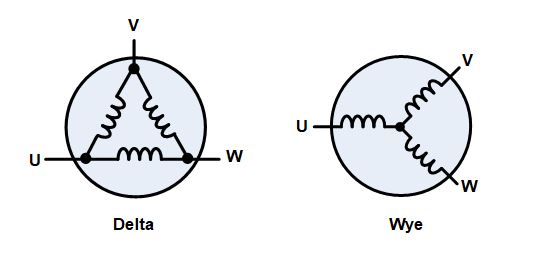
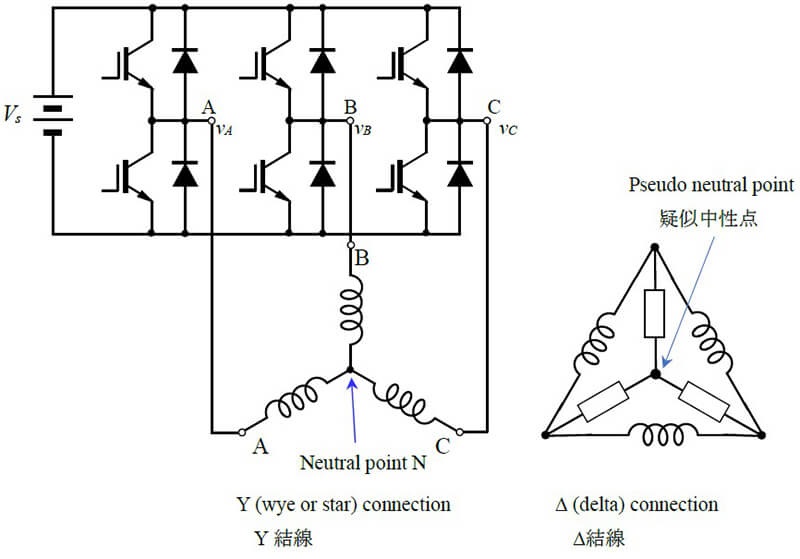
为了分析方便,以简化的三相二极内转子电机为例(且转子为磁极、定子为绕组)。事实上,定子的三相绕组有星形连结和三角连结两种方式,其中星形连结更为常用(连接方式是每一相引出导线的一头,而另一头和其他相两两相连),而我们后续就采用该模型做分析。
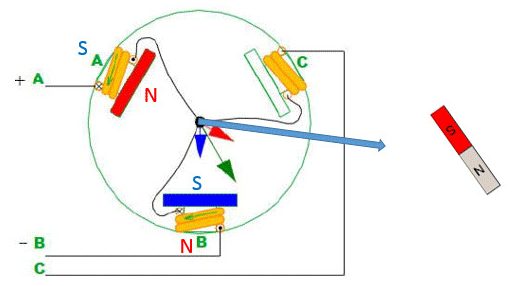
假设此时我们对A、B极分别施加正、负电压,那么由右手螺旋定则可以判断出线圈磁极的方向如下图红色箭头和蓝色箭头所示(绿色箭头可以理解为两线圈合成的磁极方向)。此时当转子处于与C点与转轴中点连线重合的角度时,受到的力矩最大(两个磁极一推一拉),直到旋转到与AB连线平行的且磁铁内部磁力线方向和AB间磁力线方向一致的时候,才是稳定的平衡位置。换句话说,AB相通电会让转子努力转到下图右边的状态。
以此类推,可以得到每个通电状态线圈绕组的磁极方向,进而获得转子的方向和角度(方向重叠、角度相反),就是下图中的6个状态,每个状态相隔60°,即完整的一周转动包括6个状态,共进行了6次换相:
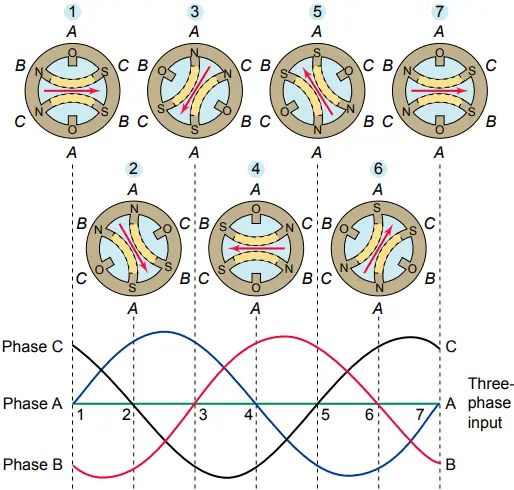
注:事实上,横坐标1和2的中间位置也是一个力平衡点。但此处三相均没有换向,因此未计入状态之一。
推荐一篇呈现了运动规律动画演示的博文。在这篇文章中,电机为外转子磁极结构,且极数为12。该电机旋转一周所需的总步数为12*3=36(极数乘以相数得到的结果,反映了电机中磁场变化的次数,决定了电机旋转一周所需的步数。总极对数越高,电机通常会具有更平滑的输出特性。至于绕组数量如何确定我还没有深究,但似乎可以使用公式 线圈绕组数=360/(相邻磁极夹角 + 360/(pole*3))) 计算出正确的值,感兴趣的朋友可以自行研究下。
驱动电路简述
无刷电机的驱动电路主要使用三相逆变电路来实现。逆变电路的主要功能是将直流电转换为交流电(通过前一节的分析可知,无刷电机驱动需要在不同时刻施加不同方向的电压,故需要逆变电路)。逆变器的工作原理是通过控制开关器件(如晶体管或MOSFET)的导通和截止,来改变电流的方向和幅值,从而产生所需频率和幅值的交流电。
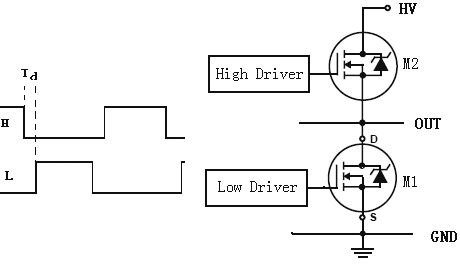
逆变电路一般是采用半桥MOS电路实现。两个功率开关器件即MOS管组成上、下桥臂,以中间点作为输出,提供方波型号。这种结构在 PWM 电机控制、DC-AC逆变、电子镇流器等场合有着广泛的应用。由于开关延时的存在,当其中的一个管子栅极信号变为低时,它并不会立刻关断,因此一个管子必须在另一个管子关断后一定时间方可开启,以防止同时开启造成的电流穿通,这个时间称为死区时间。
用3个半桥电路就可以组合成三相逆变电路,每个半桥引出的一根输出线跟无刷电机的一根相线相连,就完成了最基本的无刷驱动电路。
FOC原理
FOC项目(开源)
参考
稚晖君【自制FOC驱动器】深入浅出讲解FOC算法与SVPWM技术
DengFOC 主页文档










请登录后查看评论内容