


轻量级的语音唤醒引擎Porcupine使用
前言最近计划借助M5Stack的Core2开发板(基于乐鑫ESP32芯片)实现一个智能语音助手,能够通过语音交互与用户进行对话和执行一些简单的任务。为了简化开发过程、降低项目难度,我原本是希望能够...
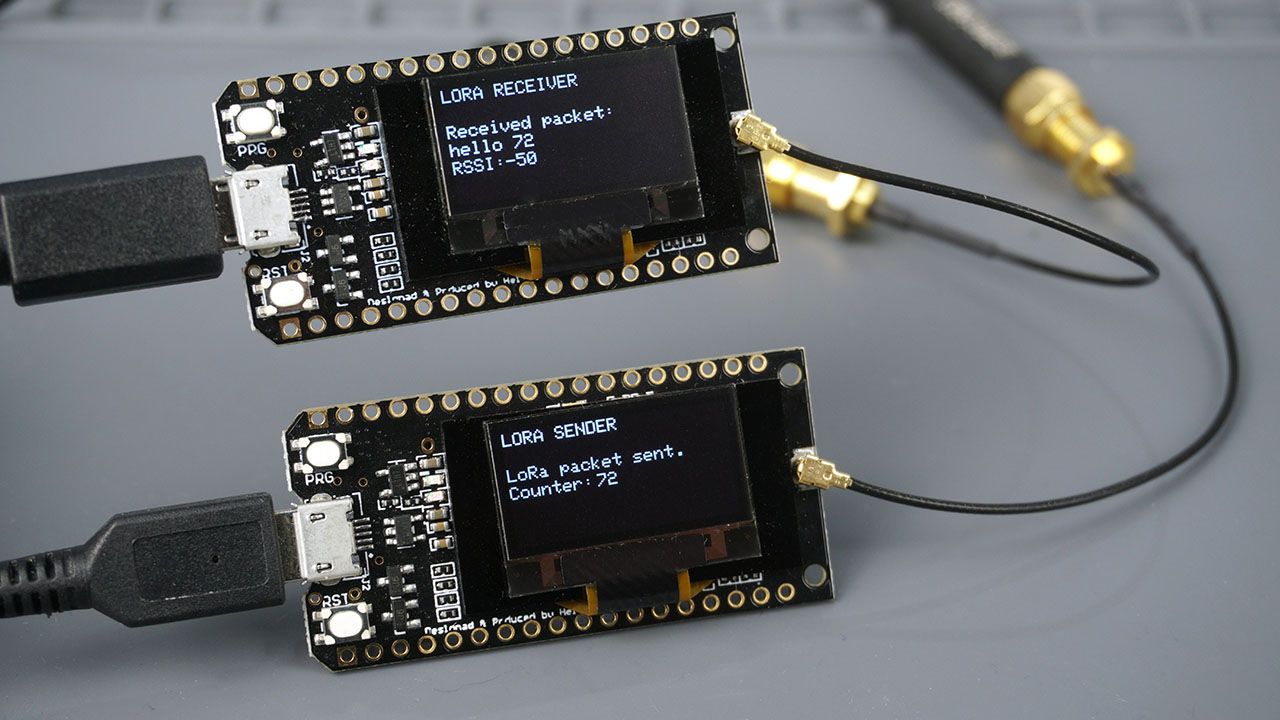
OLED显示屏工作原理及示例
前言OLED(Organic Light Emitting Diode)即有机发光二极管,是一种特殊的显示技术。与传统LCD不同,OLED显示器不需要背光,每个像素都可以独立发光,因此具有更高的对比度、更快的响应速度和...
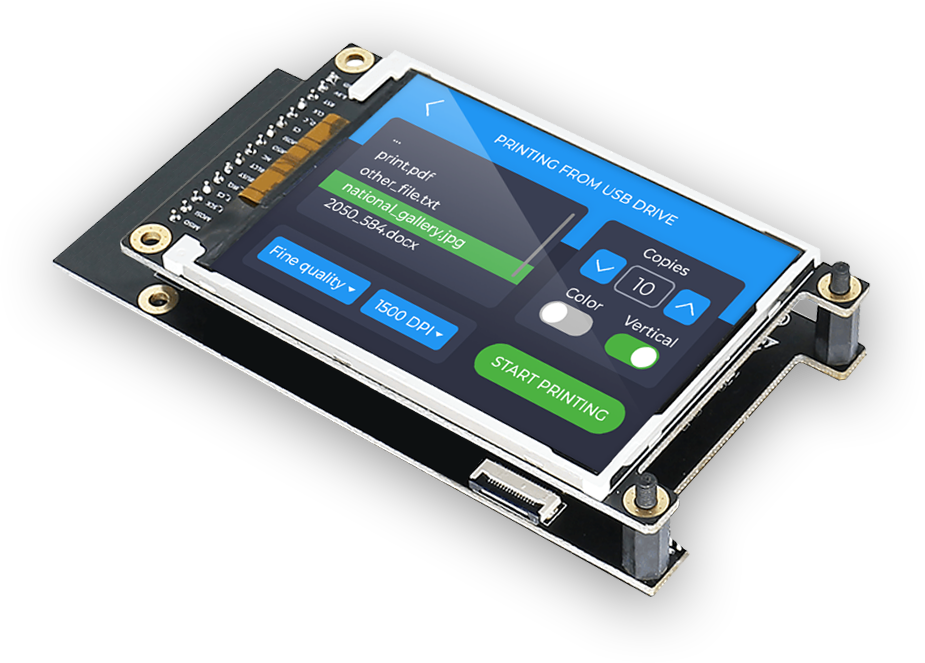
lvgl框架开发指引
LVGL简介LVGL(Light and Versatile Graphics Library)是一个轻量级的嵌入式图形库。LVGL的项目作者是来自匈牙利首都布达佩斯的 Gábor Kiss-Vámosi 。Kiss 在2016年将其发布在 GitHub上。lvgl...

Ubuntu下RTX3090GPU的TensorFlow、PyTorch深度学习环境搭建(CUDA、cuDNN)
在配置深度学习环境时,容易踩到不少坑,例如GPU驱动和CUDA版本不匹配、网络问题导致下载速度缓慢、虚拟环境Conda或VirtuaEnv配置等。这篇文章详细记录了整个配置过程,希望对大家有所帮助!(...

【摄影】我的静物摄影笔记
黑色背景的拍摄方法基本思路黑色背景好处是突出主体。如何拍摄纯黑色的背景:背景干净分开主体和背景。打光:主灯和主题离得近,曝光以主体曝光为主,则可以压暗背景。注意,当柔光箱太大时背景...

英伟达NGC&TAO开发环境部署和使用
搭建服务器基础环境英伟达GPU在Docker容器内的调用是怎么实现的呢?主要有三种方法:第一种方法是在容器内部署一编NVIDIA GPU驱动和CUDA包;第二种方法,是把宿主服务器的GPU驱动文件映射到容器...

电机减速器类型及原理简析
减速器作为一个关键的组件扮演着至关重要的角色。对于机器人而言,减速器的作用犹如人体的关节一样重要。它可以将高速输入转换为低速高扭矩输出,使机器人得以实现精准的运动控制。减速器的存在...
Windows下pygraphviz环境配置
前言使用Python的pygraphviz库需要进行以下配置:安装Graphviz软件(2.38版本兼容性好,其他版本暂不明确)安装python-graphviz(0.8.4)。该步骤可选,非必须。安装pygraphviz(1.6版本,兼容p...