

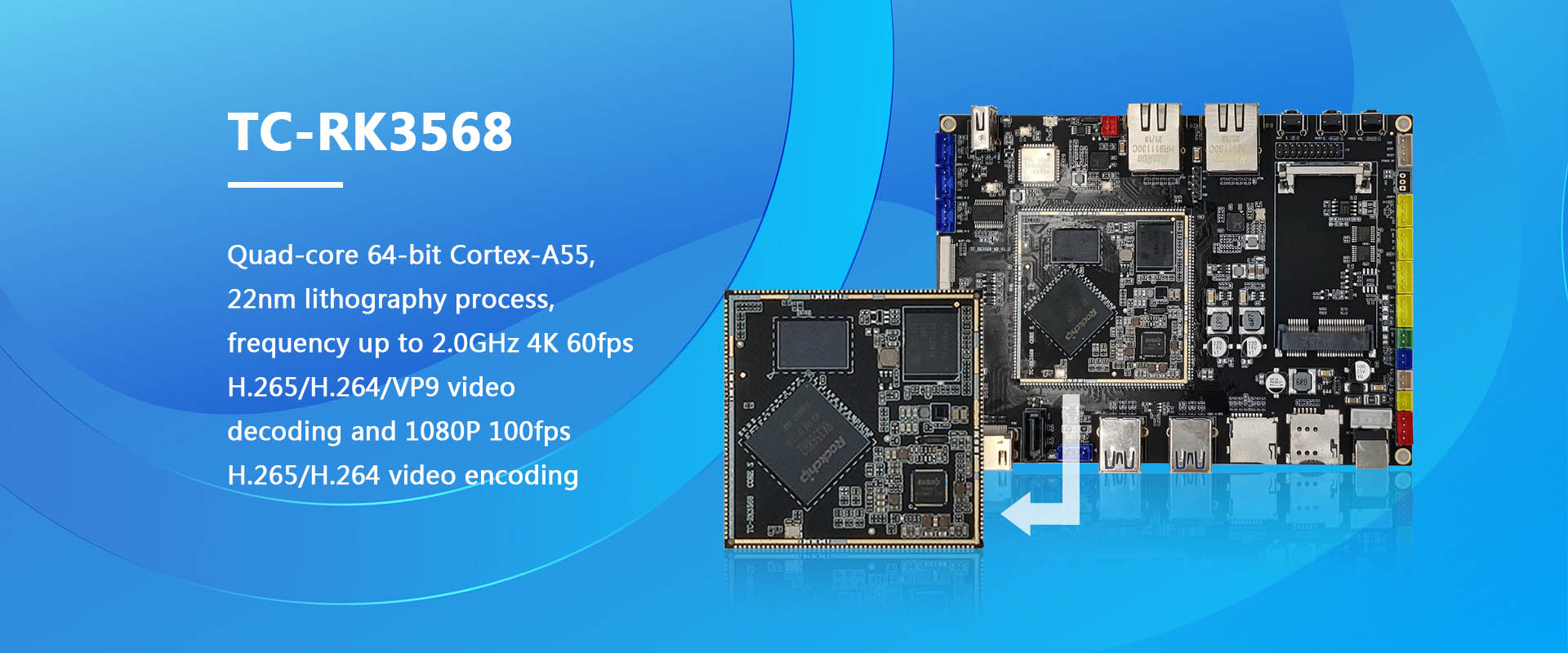
瑞芯微芯片简介及Linux软件开发指引——基于RK3568
RK3568芯片的定位是:一款高性能、低功耗的四核应用处理器。官方提供的简要手册给出了RK3568的配置和部分性能参数,以及框图:主要特性:Quad-core Cortex-A55 up to 2.0GHzMali-G52 GPU1TOPS N...
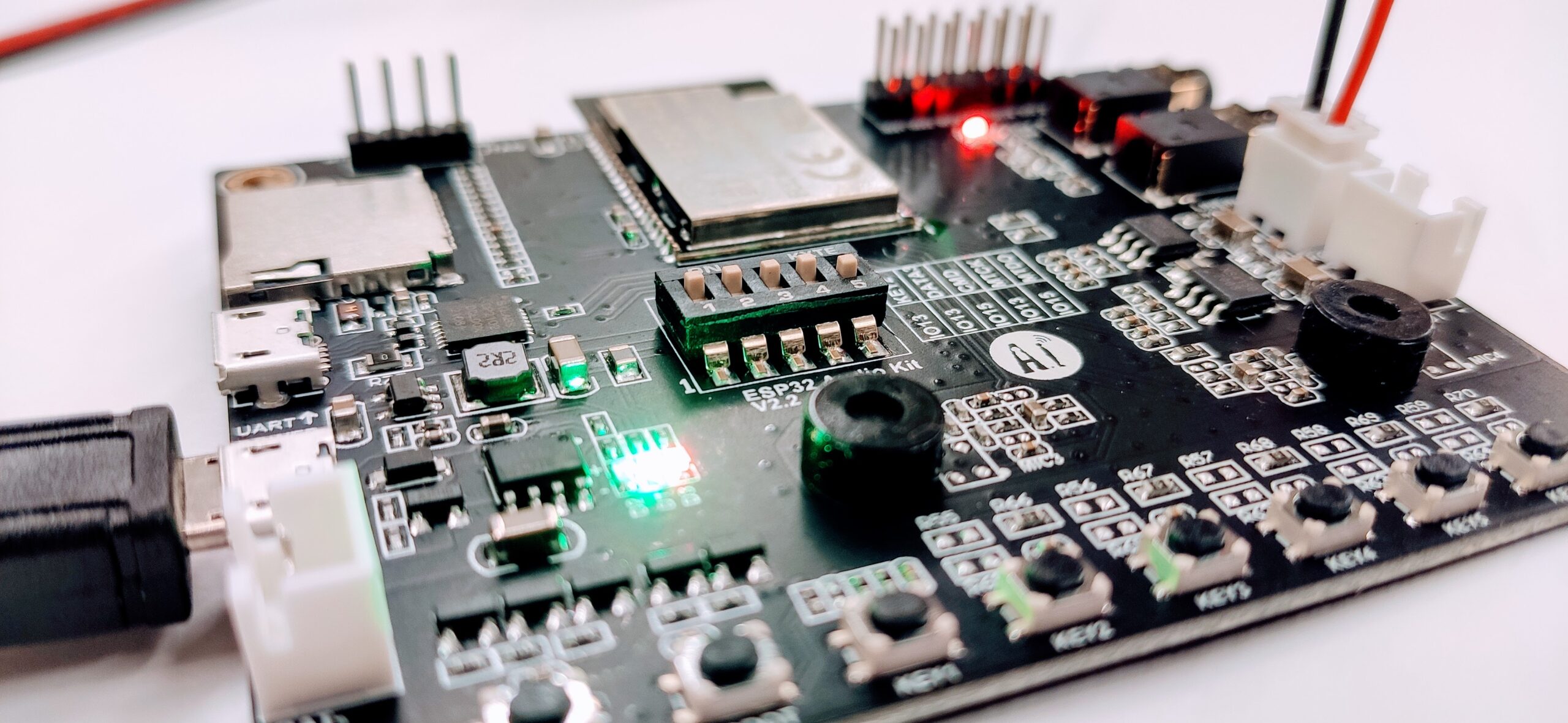
以乐鑫语音开发框架为例,系统了解嵌入式设备的语音唤醒和语音识别
截止至2023年9月份,乐鑫官方提供的语音相关开发框架或库包主要有ESP-ADF、ESP-SR和ESP-Skainet。首先对这三个框架的定位和主要功能进行阐述。说明:本篇文章有许多内容是从乐鑫相关库/框架的文...
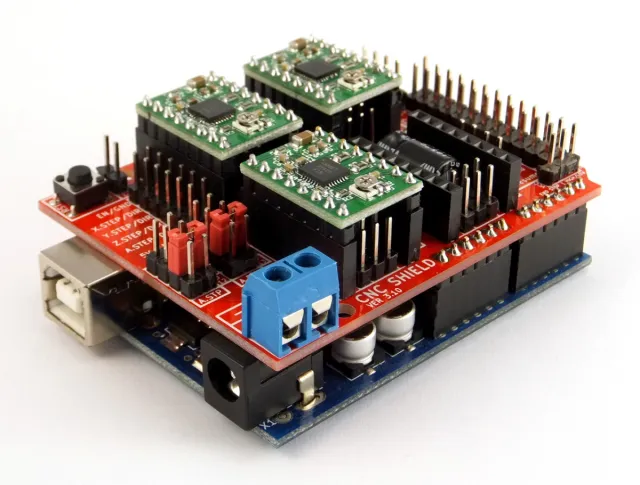
Arduino CNC Shield V3 (A4988)步进电机驱动扩展板
预备知识CNC指是计算机数字控制(Computerized Numerical Control ),顾名思义是一种通过计算机控制的自动化技术,用于控制机械设备的操作和运动。CNC技术广泛应用于各种制造领域,包括机械加...
ESP-IDF工具配置原理简要梳理
详细安装步骤在ESP-IDF V4.3 编程指南-快速入门下的页面有进行了详细的介绍,包括多系统支持(Windows、Linux和macOS)。此处仅对在配置过程中收获的知识、经验进行讨论,另外也对部分配置步骤...

Windows下VS Code插件PlatformIO使用指南(附:VS Code代理配置)
PlatformIO常用配置项快捷入口:项目配置文件 platformio.ini 官方指南platformio 支持开发板 (Eepressif 32为例)PlatformIO配置实例实例1——ESP32麦轮小车项目的配置文件[env:pico32] platf...
Windows下pygraphviz环境配置
前言使用Python的pygraphviz库需要进行以下配置:安装Graphviz软件(2.38版本兼容性好,其他版本暂不明确)安装python-graphviz(0.8.4)。该步骤可选,非必须。安装pygraphviz(1.6版本,兼容p...

英伟达NGC&TAO开发环境部署和使用
搭建服务器基础环境英伟达GPU在Docker容器内的调用是怎么实现的呢?主要有三种方法:第一种方法是在容器内部署一编NVIDIA GPU驱动和CUDA包;第二种方法,是把宿主服务器的GPU驱动文件映射到容器...
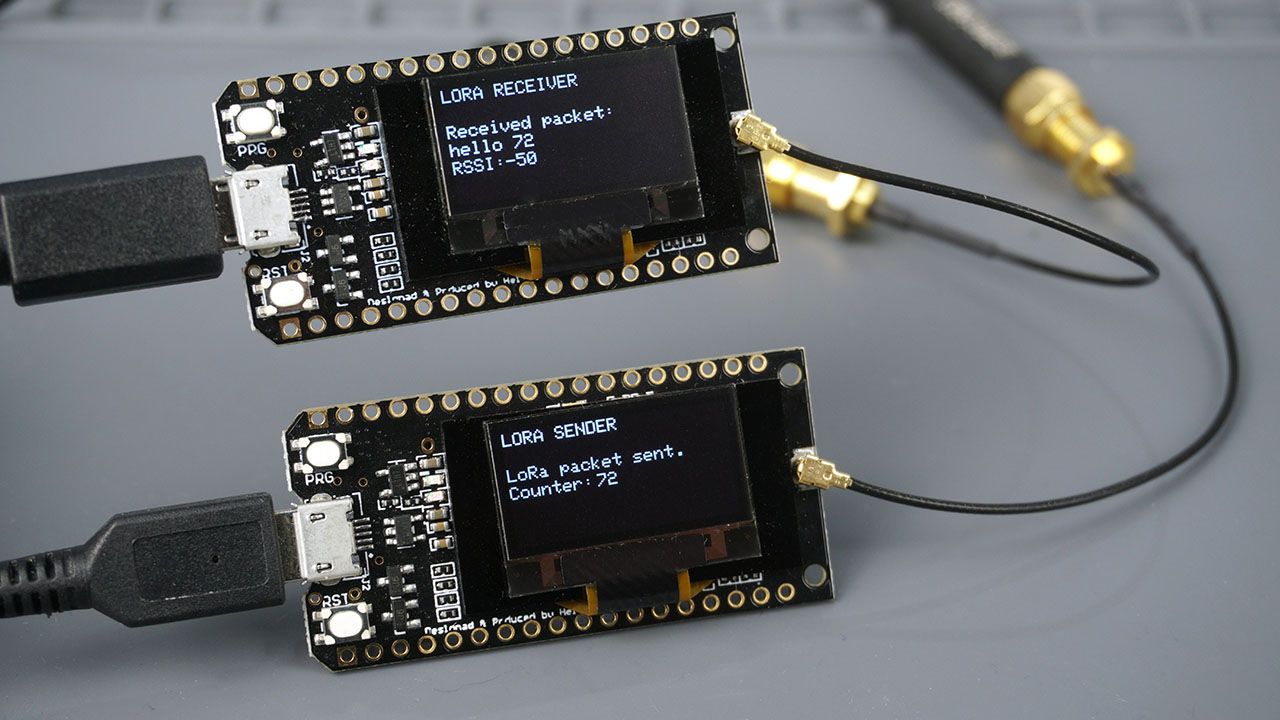
OLED显示屏工作原理及示例
前言OLED(Organic Light Emitting Diode)即有机发光二极管,是一种特殊的显示技术。与传统LCD不同,OLED显示器不需要背光,每个像素都可以独立发光,因此具有更高的对比度、更快的响应速度和...